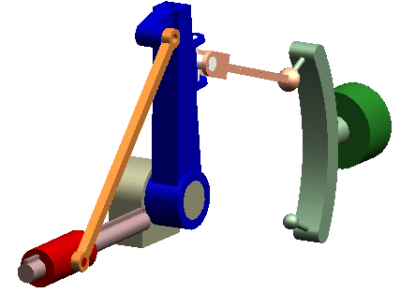
运动仿真工作流程
通过此过程,可以直接由装配部件创建移动零件,以及直接由装配约束创建运动副。然后可以添加运动生成器并施加载荷。运行运动仿真后,可以使用运动结果对移动装配进行动画演示,并检查装配在其整个仿真运动范围内移动时的干涉情况。
此工作流程介绍了运动仿真界面术语以及定义运动研究。要打开 CHM 格式帮助文件和教程,请参见学习使用 天工 CAD 运动仿真。
定义运动机构
-
在 天工 CAD 中打开您的装配模型。
-
检查您的产品概念。标识感兴趣的部件、它们的连接方式以及驱动部件运动的因素。确定要了解产品的哪些特性。您可以使用路径查找器临时隐藏不想包含在运动仿真中的部件。
-
选择工具选项卡→环境组→运动
 。
。-
运动窗口将显示。
-
-
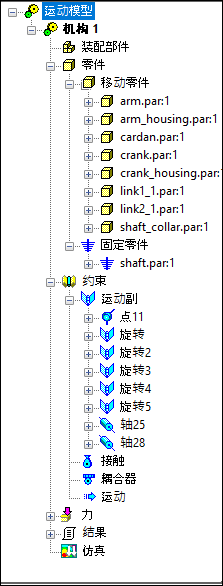
使用以下任一方法选择参与机构的零件。零件表示要对其运动进行仿真的刚体。将零件指定为移动零件或非移动(固定)零件。移动零件具有六个自由度,而固定零件没有自由度。固定零件附加有符号,以表明它已被固定。
- 自动
-
第一次在运动环境中打开装配时,会有一个对话框列出装配中的所有零件,并提示您指示是否要将新零件自动添加为固定零件或移动零件?
在后续文件打开时或选择新建机构命令时,可以使用运动 - 添加新零件对话框来获得相同的结果。
Tip:如果拒绝使用此自动方法,则装配中的所有零件都将添加到运动浏览器的装配部件节点中。然后,可以选择各个零件并将其拖到移动零件或固定零件节点中。
- 手工
-
选择主页选项卡→机构组→构建器命令,单击零件选项卡,然后通过将零件拖动到运动构建器内的相应列表中,有选择地将零件指派为移动零件或固定零件。
Tip:运动构建器是运动仿真中的主要界面。它是一个选项卡式对话框,是一个向导,可引导您完成由装配创建运动模型、执行运动仿真和查看仿真结果的过程。要打开关联的帮助主题:
-
单击
 。
。 -
单击向导中的控件。
-
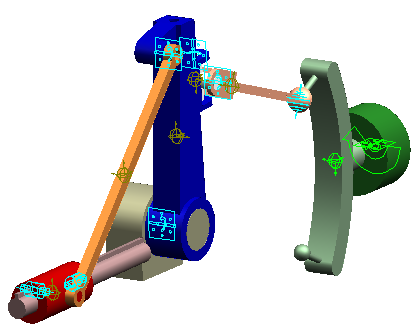
使用自动或手动方法,检测关系(例如,轴向、平面、对称)并显示在消息框中。这些关系用于自动生成运动约束。在运动浏览器中,展开约束→运动副节点,以在一个列表中查看它们。继续展开节点以确定约束 ID,并查看应用它们的零件。
-
(可选)在上一步中,约束标识在装配中,并在运动模型中自动创建。要在机械系统中添加更多约束以连接零件,可以:
-
右键单击运动浏览器中的约束节点,选择要添加的约束类型,然后选择想要约束的 天工 CAD 模型上的部件。
-
使用运动构建器中的运动副选项卡。
Note:作为单元移动的任何元素都定义为刚体。约束定义刚体的连接方式以及它们相对于彼此的移动方式。运动副约束通过物理连接来约束一对刚体的相对移动。
运动副会移除它们所连接的零件的自由度。还可以使用固定运动副将两个零件刚性地连接在一起。
-
将运动应用于机构中的约束 - 可以使用运动浏览器中约束节点上的快捷命令,直接在零件上定义运动生成器。也可以使用运动构建器中的运动选项卡。可以使用内置函数或通过自己创建函数向运动提供输入。
示例:运动可以输入作为时间函数的旋转运动或平移运动。函数 TIME * 360d 定义一个运动驱动器,该运动驱动器在每个单位时间内将一个体相对另一个体旋转一整圈(360 度)。
-
(对于动态运动)在运动浏览器中的力节点上使用快捷命令添加运动载荷。应用于运动研究中的载荷类似于 FEA 研究中的结构载荷:作用于机构上的外力和扭矩。
-
可以定义作用于机构的重力、阻力(弹簧、阻尼器、衬套)或其他载荷,包括作用力、作用力矩、作用/反作用力以及冲击力。
-
每个力都需要力方向和力幅值。要定义力幅值,可以输入值、使用预定义函数(步长、谐波、样条)或使用函数构建器创建表达式函数。
Note:力定义零件上的载荷和符合性。力并不绝对禁止或规定运动。因此,它们不会添加或移除模型中的自由度。力可能抵抗运动,也可能会诱发运动。
-
运行运动仿真
-
运行运动仿真 - 可以使用运动构建器中的仿真选项卡、命令功能区上的仿真命令,或运动浏览器中的机构节点执行此操作。
求解器计算作用于机构中每个移动零件的位移、速度、加速度和反作用力。
-
使用运动构建器查看运动仿真结果。
-
在动画选项卡上,可按帧或按设置增量查看机构框架的运动。还可以显示运动的特定段。
-
在干涉选项卡上,检查并显示干涉的零件。
-