教程:锥齿轮
本教程演示如何定义构件、创建耦合器以将动力传递到运动副,以及图形化仿真结果。
打开装配模型
- 打开安装目录下的文件 \Program Files\NDS\TianGong 2024\Training\Bevel Gears\BevelGear_Coupler.asm 。
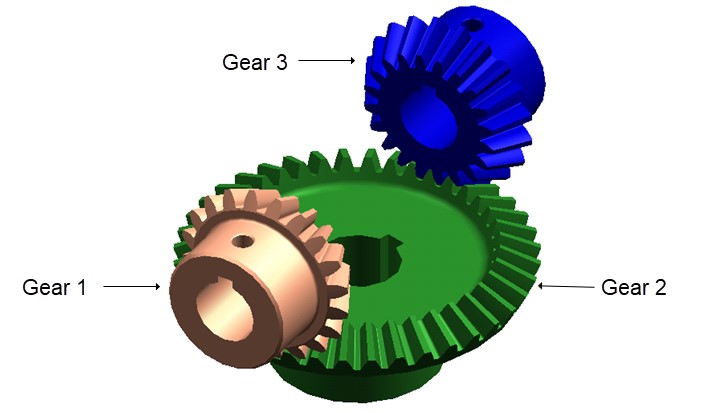
- 您将看到下图所示的模型:
创建机构
- 在功能区,选择工具选择卡→环境组→运动命令
 。
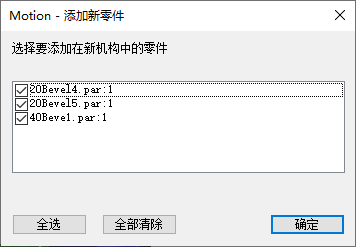
。 - 在添加新零件对话框,单击确定。
- 机构已创建。
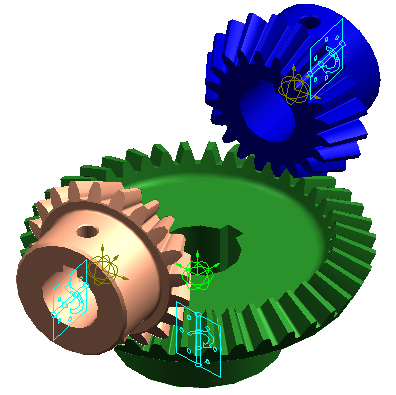
指定构件
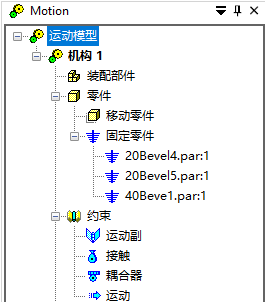
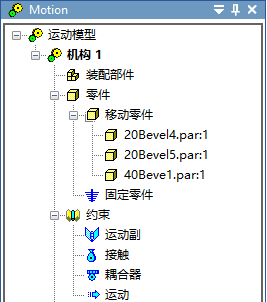
- 将三个零件全部设置为活动构件。
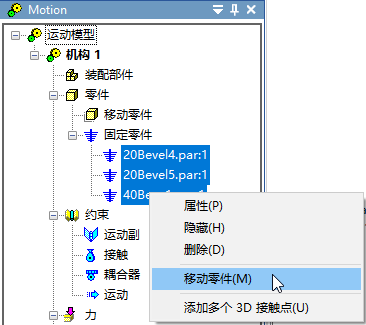
- 您的界面应该与下图一样。
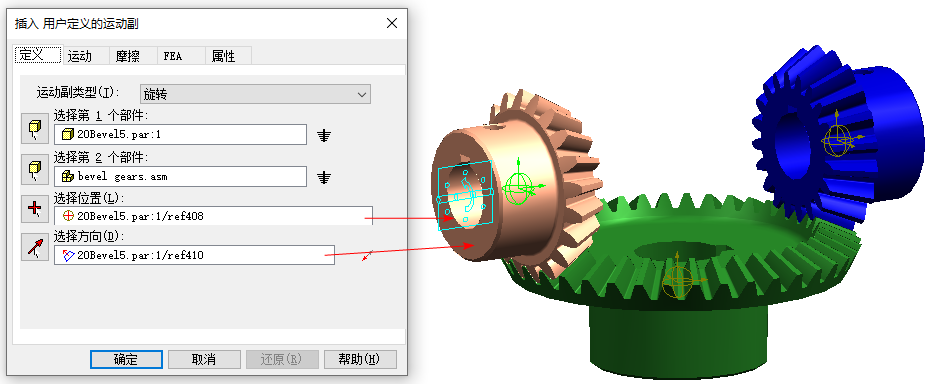
添加运动副
在此步骤中,添加运动副以约束齿轮的自由度。运动副将定位在每个齿轮后侧圆形边缘的中心。
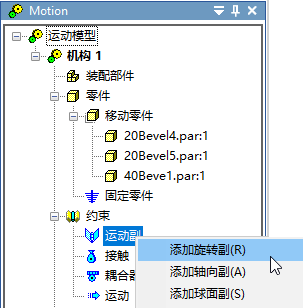
- 右键单击运动副节点,选择添加旋转副。
- 选择 20Bevel5.par:1 为第 1 个部件。选择
 为第 2 个部件。
为第 2 个部件。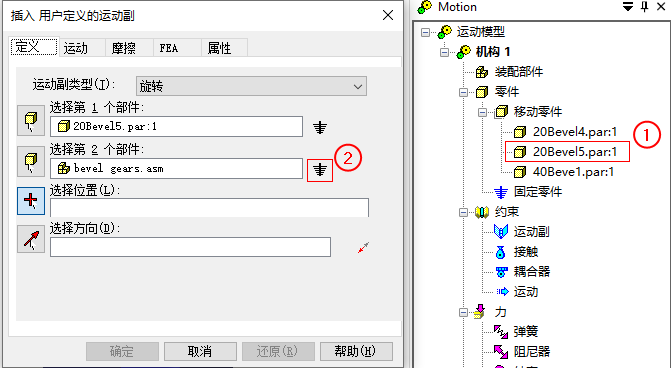
- 选择红色箭头所指的边线为位置。选择红色箭头所指的面为方向。
- 按照同样的方法,为另外 2 个齿轮添加旋转副。
齿轮上会显示旋转副图标和自由度图标。
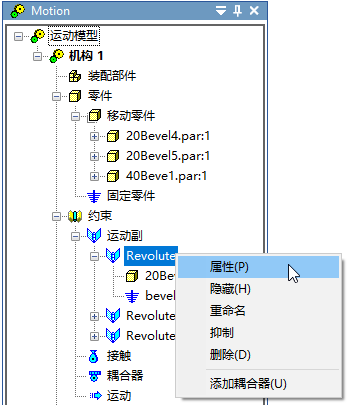
添加初始动力
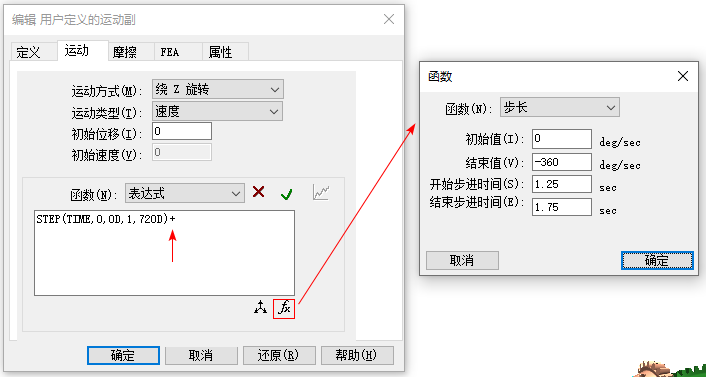
在此步骤中,将速度表达式指派到 齿轮 20Bevel5.par:1 与地面之间的旋转副。
- 找到齿轮 20Bevel5.par:1 与地面之间的旋转副,右键单击它,选择属性。
- 在运动页签,按下图所示设置参数。
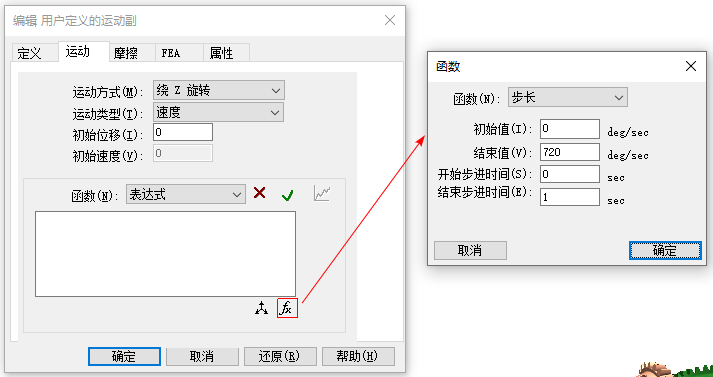
- 在函数对话框,单击确定。
- 输入 + ,然后再次添加函数。
- 您的函数表达式应该与下图相同。
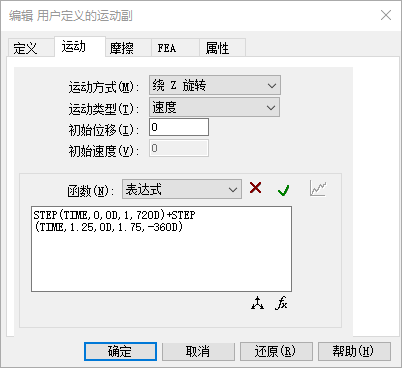
- 单击确定。
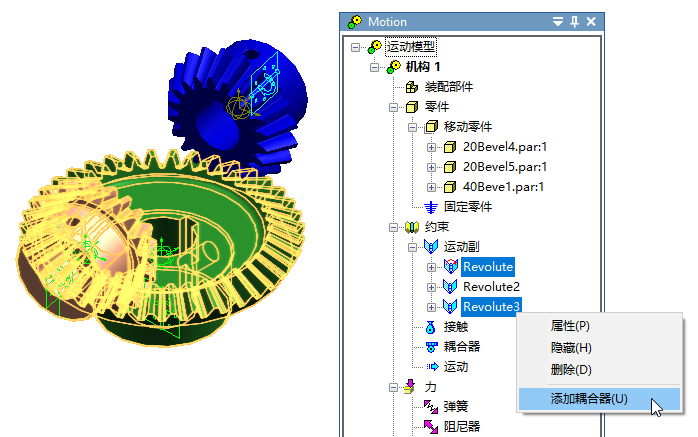
为第一对齿轮添加耦合器
在此步骤中,为第一对齿轮添加耦合器。
- 按住 Ctrl ,选择第一对齿轮上的两个旋转副。右键单击,选择添加耦合器。
- 按下图所示设置参数。

- 单击确定。
运行仿真
在此步骤,运行仿真并观察齿轮的转动方向。
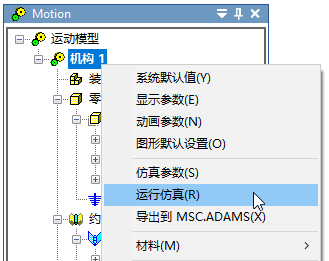
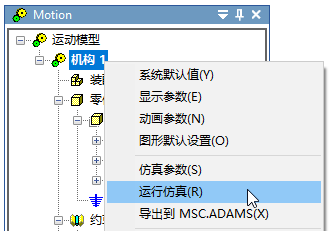
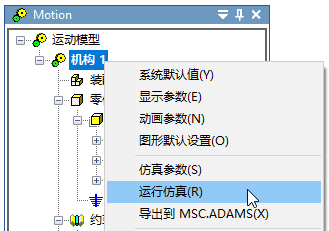
- 右键单击机构1节点,选择仿真参数。
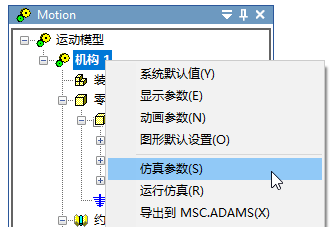
- 设置持续时间和帧数。
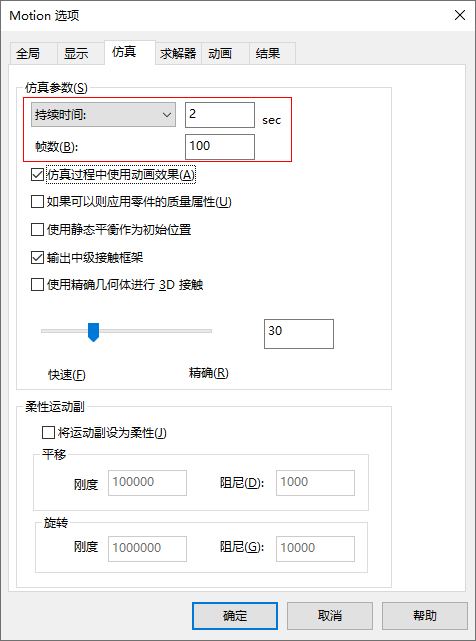
- 运行仿真。
Note:
如果齿轮转动方向与预期相反,则执行以下步骤:
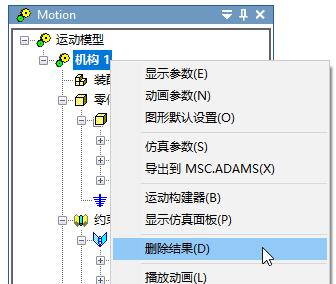
- 删除仿真结果。
- 右键单击 Coupler 节点,选择属性。
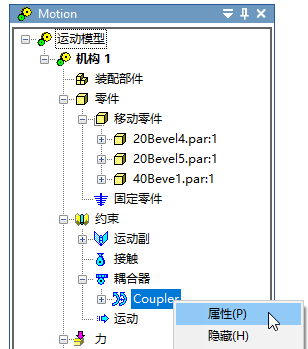
- 在角度值前面加上负号。

- 单击确定。
为第二对齿轮添加耦合器
使用同样的方法,为第二对齿轮添加耦合器。
- 选择第二对齿轮上的旋转副,右键单击它,选择添加耦合器。

- 设置相对旋转角度。

- 单击确定。
运行仿真
在此步骤,运行仿真并观察齿轮的旋转方向。
- 运行仿真。
Note:
如果齿轮转动方向与预期相反,则执行以下步骤:
- 删除仿真结果。必须删除结果,才能修改耦合器参数。
- 修改耦合器参数。

- 重新运行仿真。
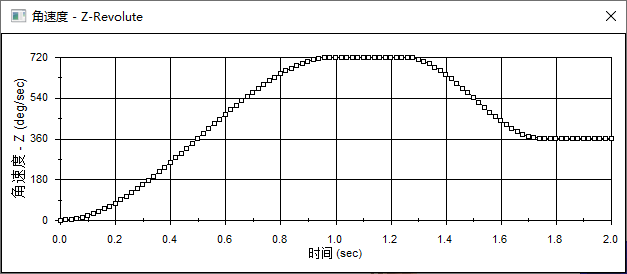
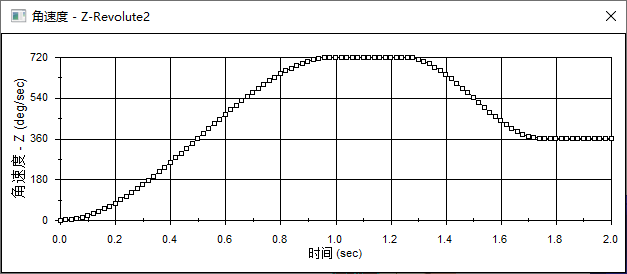
生成角速度变化图
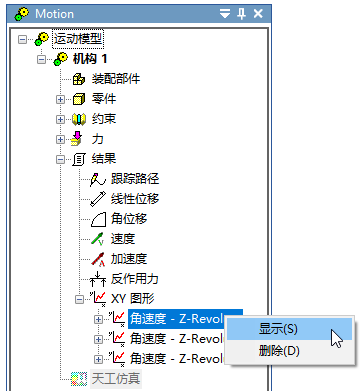
在此步骤中,生成每个齿轮的角速度变化图。
- 选择第一个旋转副,右键单击,选择。
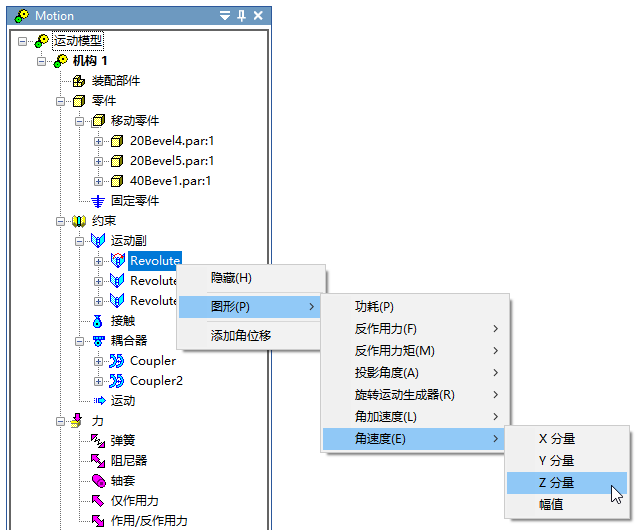
图形已生成。
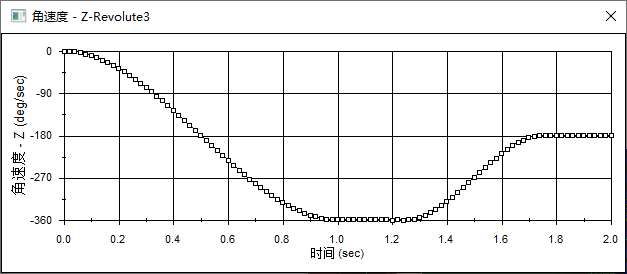
- 按照同样的方法,生成另外两个旋转副的角速度变化图。
- 关闭图形后,可以通过右键菜单显示它。