教程:加工钳
在本教程中将模拟一个更复杂的模型 - 加工钳。
打开装配
- 打开安装目录下的文件 \Program Files\NDS\TianGong 2024\Training\Actuator Clamp\Actuator Clamp.asm 。
- 您将看到下图所示的模型:
创建机构
- 在功能区,选择工具选择卡→环境组→运动命令
 。
。进入运动环境。
- 如果 Motion 窗格没有显示,则在功能区,选择视图选择卡→显示组→窗格列→Motion命令。
- 在功能区,选择主页选项卡→机构组→新建机构命令
 。
。 - 在新建机构对话框,单击确定。
- 在添加新零件对话框,单击确定。
- 观察 Motion 窗格中创建的机构。关闭 Motion
消息对话框。
设置时间单位和重力参数
- 在 Motion
窗格,右键单击机构1节点,选择系统默认值。
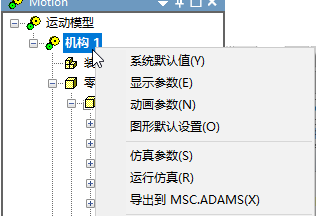
Motion 选项对话框会弹出。
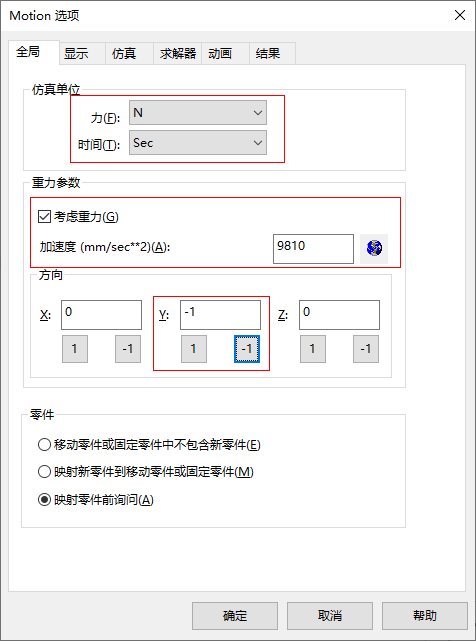
- 将力的单位设置为牛顿,时间的单位设置为秒。勾选考虑重力,且重力的大小设置为
9810 mm/sec^2 并且作用于 -Y 方向。
设置完成后单击确定 按钮。
定义活动构件和固定构件
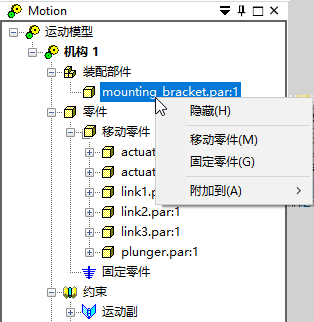
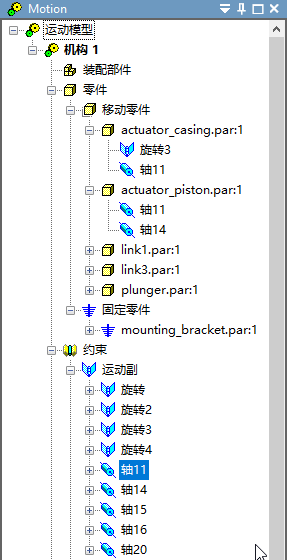
- 确保mounting_bracket.par:1是固定构件,其它所有零件是活动构件,如下图。
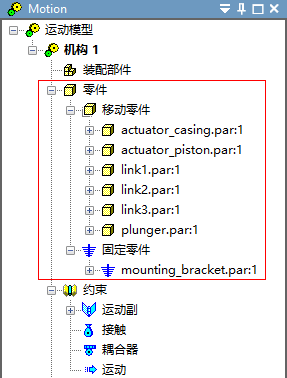
如果不是,则使用以下操作之一进行设置。以将mounting_bracket.par:1设置为固定零件为例:
- 将mounting_bracket.par:1拖动到固定零件节点下。
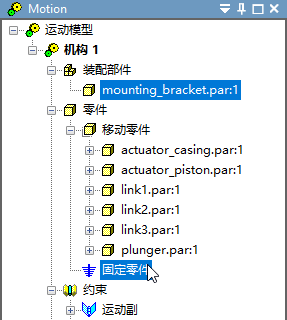
- 右键单击mounting_bracket.par:1,选择固定零件。
 Note:
Note:在Motion窗格,支持按住 Ctrl 键多选或框选多个零件进行操作。
- 将mounting_bracket.par:1拖动到固定零件节点下。
-
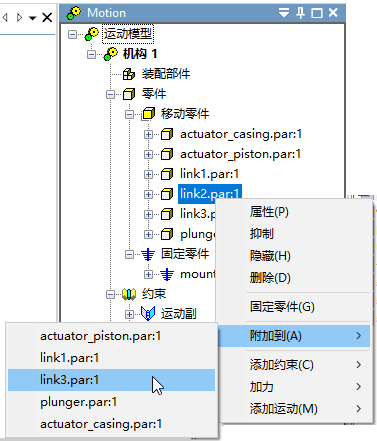
所有剩余的零件(除了link2.par:1 }都需要作为移动零件。使用拖放技术或使用弹出菜单技术都可以将这些零件变为移动零件。按住 CTRL 键一个接一个地选定零件就可以选中所有零件或者使用拖动方法选中所有的零件,然后按下 CTRL 键,取消选中link2.par:1。
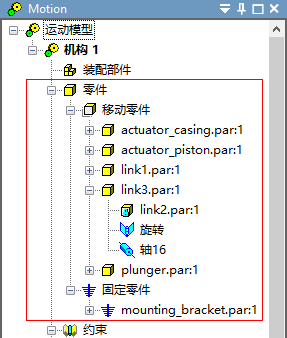
然后浏览器将如下所示:
- 右键单击link2.par:1,将link2.par:1附加到link3.par:1。
link2.par:1 将刚性连接到link3.par:1 上,并且将随着link3.par:1 的移动而移动。
您的活动构件与固定构件应该如下图所示。
添加初始动力
在这步中,把初始动力添加到actuator_casing.par:1 和acturator_piston.par:1 的轴副。
- 在Motion窗格,找到actuator_casing.par:1
和acturator_piston.par:1的轴副,然后选中它。
- 右键单击该轴副,选择属性 。
编辑 配对定义的运动副对话框会弹出。
- 要模拟加工钳的开、合操作,需要把谐运动添加到平移 Z 自由度上。按下图所示输入各个值:
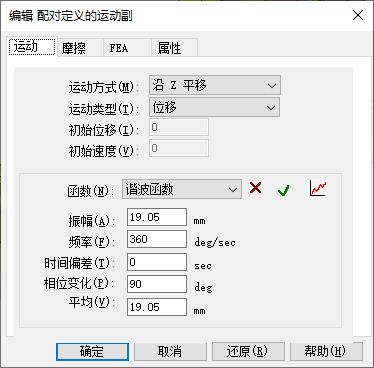
谐运动具有 19.05 mm的振幅并且每秒完成一个周期。由于谐运动的平均值是 19.05,所以传递给运动副的实际位移范围是从 0 到 38.10。
设置完成后单击确定 按钮。
模拟机构运动
指定模拟参数,然后执行仿真。
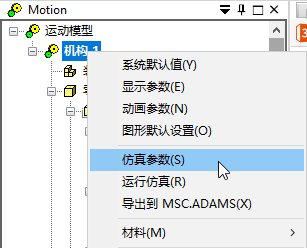
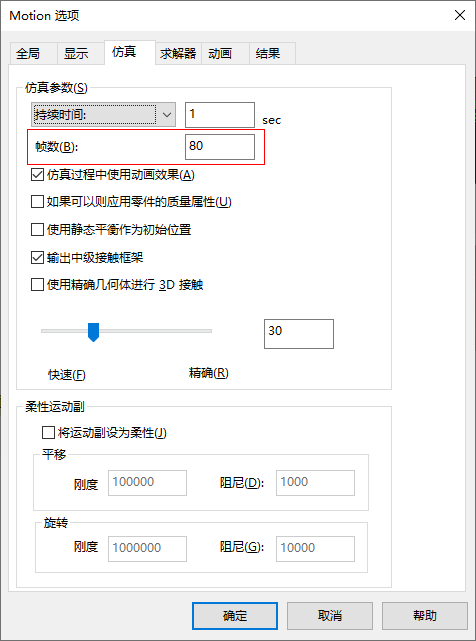
- 在Motion窗格,右键单击构件1节点,选择仿真参数。
Motion选项对话框会弹出。
- 将帧数设置为 80 ,其余参数保持默认。完成后单击确定 按钮。
- 在Motion窗格底部,单击仿真按钮
 启动模拟过程。模型将按照对其所进行的解算呈现动画显示。
启动模拟过程。模型将按照对其所进行的解算呈现动画显示。
仿真结束后,Motion窗格底部会出现滚动条,拖动它可以查看机构运动过程。

生成动画
为完整的模拟过程生成AVI格式的动画。
- 在Motion窗格,右键单击机构1节点,选择动画参数。
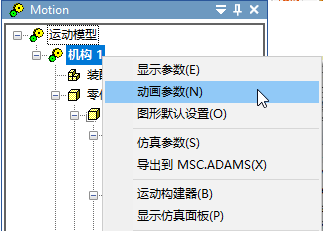
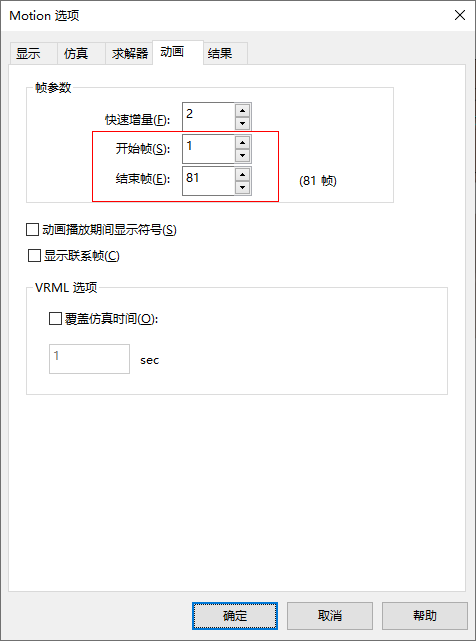
Motion选项对话框会弹出。
- 确保起始帧和结束帧分别被设置为 1 和 81。完成后单击确定 按钮。
- 在Motion窗格,右键单击机构1节点,选择导出AVI电影。

- 在另存为输入框,修改路径和文件名,单击确定。
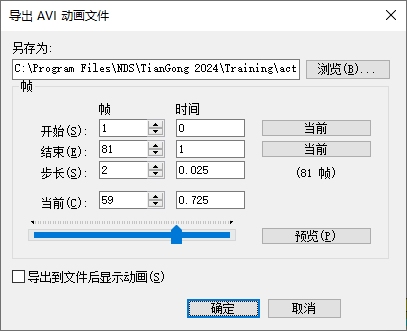
AVI格式的动画将生成并保存在指定路径下。
教程结束。